Biography
David Usevitch is currently a postdoctoral research fellow of surgical robotics in the BIGSS Lab and Orthopedic Surgery Department at Johns Hopkins University. His research interests include surgical robotic systems, haptics and telerobotics, clinical translational systems, and robot design. He works along Dr. Mehran Armand and Dr. Russ Taylor’s team developing robots for orthopedic surgery.
His current projects include the development of tools and robotic systems to assist in laminectomy and TLIF surgery (spine surgery), and the development of microsurgical manipulators for a variety of ENT and Opthalmologic surgeries. David also has extensive experience in the startup space, having working for a number of small startups, and recently winning 2nd in a JHU medical device pitch competition, raising over $15k.
He is currently open to and exploring new career opportunities in industry positions in a variety of robotics applications. Please reach out if you are looking to hire.
Download my resumé.
- Surgical Robotics
- Haptics and Teleoperation
- Robotics Design and Commercial Translation
-
Research Fellow in Surgical Robotics, 2022
Johns Hopkins University, Laboratory for Computational Sensing
-
PhD in Mechanical Engineering, 2021
University of Utah, Robotics Center, Telerobotics Lab
-
MEng in Mechanical Engineering, 2018
University of Utah, Robotics Center, Telerobotics Lab
-
BSc in Mechanical Engineering, 2016
Brigham Young University
Skills
Experience
- Invented and prototyped flexible microsurgery multipurpose surgical robot and tool. Directed 2 students in robot CAD design,rapid prototyping, and controls development.
- Creating an augmented handheld drill for improved laminectomy milling. Conducting tests examining surgeon drilling preferences in AMBF virtual environment and testing multi-sensor deep learning state detection for safer and faster laminectomy drilling.
- Built on existing software framework for UR robot interface robot in C++, creating Python script bindings for “real time” ROS/ROS 2 commands.
- Image-guided Surgical Navigation: Created intuitive image-guided tool navigation software in C++, reducing state-of-the-art navigation time by 63% and doubling navigation intuition. Conducted human subject studies for method validation and secured patent.
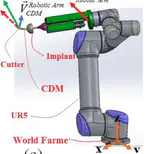
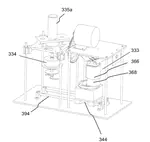
- Magnetically-Guided Cochlear Implant Surgery: Built hardware and C++ software for magnetic guidance of cochlear implants to eliminate insertion trauma. Conducted end-to-end planning and execution of 36 in-vivo animal surgeries. Demonstrated up to 38% reduced trauma insertion force using magnetic guidance.
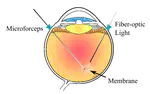
- Telemanipulated Retinal Surgery Robot: Collected eye-surgery data and devised EKF-based filtering algorithms to characterize head motions (<5 degrees) for robot design via a single IMU for tracking.
- Motion Planning for Intraoperative Magnetic Microrobot Swarms: Formulated motion planning methods to use 8 magnetic fields for wireless control of microrobot swarms for drug delivery and tumor ablation.
- TA for Mechatronics and Numerical Methods courses.
- Relevant courses taken: Robotics, Controls, Motion Planning, Haptics, System ID, Machine Learning, Computer Vision
- ORCA - Compliant Haptic Force Sensor: Invented a compliant, 1-DOF haptic force sensor similar to the Stanford Haptic paddle which displays force difference of up to 5.8 N.
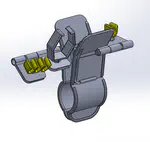
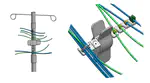
- BABEL lab - Novel Spinal Clamp Development: Prepared FEA analysis and executed load testing on jointless compliant spinal clamp for spinal fusion surgery without pedicle screws.
- CAD lab - Team Optimization and Design: Constructed genetic optimization algorithms and an analytics tracking platform for optimized team formation and improved work efficiency for a multi-user CAD system.
- SEEL - Web Team Manager and Developer:
Projects




Recent Publications
Contact
- usevitch@jhu.edu
- Baltimore, MD