David E. Usevitch, Ph.D.
David E. Usevitch, Ph.D.
Home
Projects
Gallery
Talks
Publications
Contact
Light
Dark
Automatic
surgical_robotics
Development of a Novel Microsurgery Manipulator
Design and implementation of a multi-use microsurgical manipulator in a surgical environment.
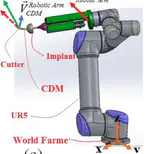
Software Development for Infrustructure of Robot Drilling Tool
Developed code to move the UR robot in ways to drill using a cable-driven continuum Snake Robot
Magnetic Guidance of Cochlear Implants into Guinea Pigs
Surgery Study using our Custom Robotic Cochlear Implant Insertion Device
Deep Learning Analysis of Sensor Data from Handheld Drills
Exploring navigation and sensing using various sensors on handheld drills
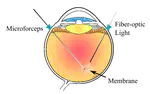
Examining the Basilar Membrane with Robotically Inserted CI Electrodes
Magnetic Steering of Robotically Inserted Lateral-wall Cochlear-implant Electrode Arrays Reduces Forces on the Basilar Membrane In Vitro
Magnetic Manipulation of Microrobot Swarms
Virtually modelling of omnimagnets to test 2 methods for controlling microrobot swarms in 3D space
Video
Characterization of Patient Head Motion in Vitreoretinal Surgery
Exploration of ways to improve head tracking for anticipating motion for eye surgery.
Cite
×