Magnetic Manipulation of Microrobot Swarms
 Microbot Swarm Control
Microbot Swarm Control
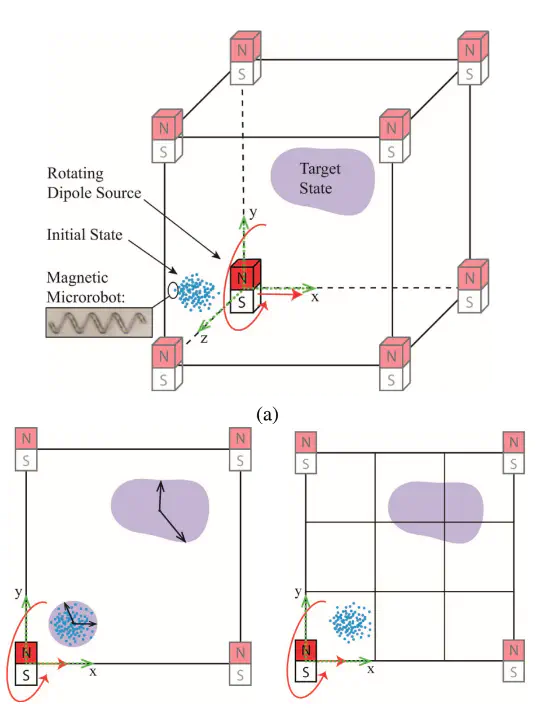
Swarms of magnetic microrobots have previously been proposed to achieve various tasks inside of thehuman body. We are interested in the optimal guidance of a microrobot swarm from an initial state to a final goal state using an array of eight electromagnets generating magnetic dipole fields. We compare the convergence, computation complexity, and time-to-target time for moving the microrobots to the correct configuration using two different methods of guidance previously suggested. The first method guides the centroid and spread or deviation of the swarm to a final centroid location and spread. The second method divides the workspace into voxels and guides the microrobots from the initial voxel density state to a final goal voxel density. Both methods yield comparable restuls, however the voxel method outperforms the centroid method in terms of convergence.
David E. Usevitch
Medical Robotics Research Fellow
My research interests include distributed robotics, mobile computing and programmable matter.