Software Development for Infrustructure of Robot Drilling Tool
 Snake and UR Robot
Snake and UR Robot
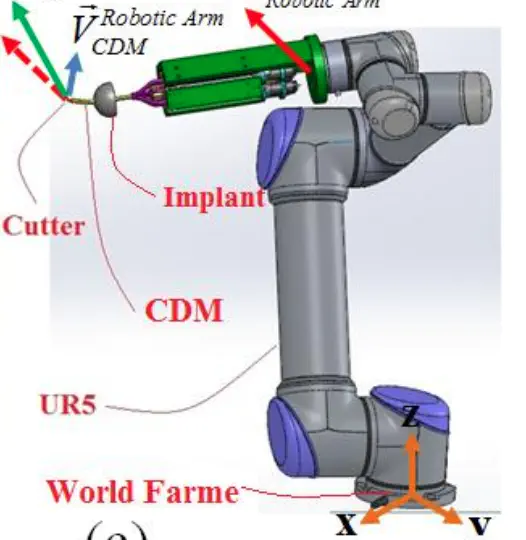
A continuum snake robot for drilling was developed previously in the BIGSS lab. This project continued the software high-level and mid-level control development for the UR interface using Python and C++. The JHU CISST library was heavily integrated to move the arm under position, velocity, and various other types of control, and some contraints were implemented to guide the robot along simple trajectories. Basic simulations were performed in ROS/Gazebo/RVIZ configurations for validation and some tested on a physical UR5 robot.
David E. Usevitch
Medical Robotics Research Fellow
My research interests include distributed robotics, mobile computing and programmable matter.