Translational and Rotational Arrow Cues (TRAC) Navigation Method for Manual Alignment Tasks
 TRAC Snapshot
TRAC Snapshot
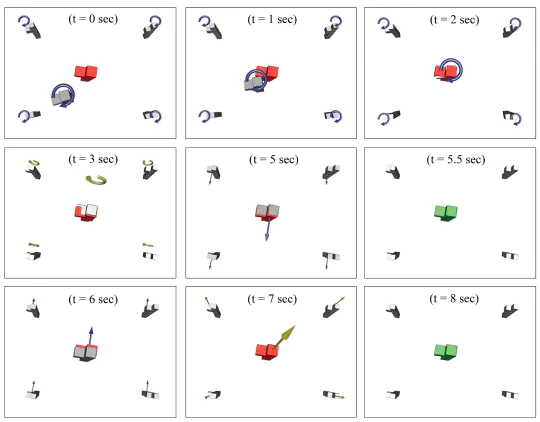
Many tasks in image-guided surgery require a clinician to manually position an instrument in space, with respect to a patient, with five or six degrees of freedom (DOF). In this project, we developed a method of visually communicating navigation instructions using translational and rotational arrow cues (TRAC) defined in an objectcentric frame, while displaying a single principal view that approximates the human’s egocentric view of the physical object. We found that subjects can achieve 1 mm and 1 degree accuracy using the TRAC method with a median completion time of less than 20 seconds.
This software work has been patented, and the work was presented at the 2018 Hamlyn Symposium on Medical Robotics in London, and in ACM Transactions on Applied Perception.
We hope to release a software package for this project soon.
David E. Usevitch
Medical Robotics Research Fellow
My research interests include distributed robotics, mobile computing and programmable matter.