Estimating the Pose of a Guinea-pig Cochlea Without Medical Imaging
Abstract
- Hypothesis: The pose (i.e., position and orientation) of a guinea-pig cochlea can be accurately estimated using externally observable features, without requiring computedtomography (CT) scans
- Background: Guinea pigs are frequently used in otologic research as animal models of cochlear-implant surgery. In robot-assisted surgical insertion of cochlear-implant electrode arrays, knowing the cochlea pose is required. A preoperative CT scan of the guinea-pig anatomy can be labeled and registered to the surgical system, however, this process can be expensive and time consuming. Methods: Anatomical features from both sides of 11 guinea pig CT scans were labeled and registered, forming sets. Using a groupwise point-set registration algorithm, errors in cochlea position and modiolar-axis orientation were estimated for 11 iterations of registration where each feature set was used as a hold-out set containing a reduced number of features that could all be touched by a motion-tracking probe intraoperatively. The method was validated on 2000 simulated guinea-pig cochleae and six physical guinea-pig-skull cochleae.
- Results: Validation on simulated cochleae resulted in cochlea-position estimates with a maximum error of 0.43 mm and modiolar-axis orientation estimates with a maximum error of 8.1 degrees for 96.7% of cochleae. Physical validation resulted in cochlea-position estimates with a maximum error of 0.80 mm and modiolar-axis orientation estimates with a maximum error of 12.4 degrees.
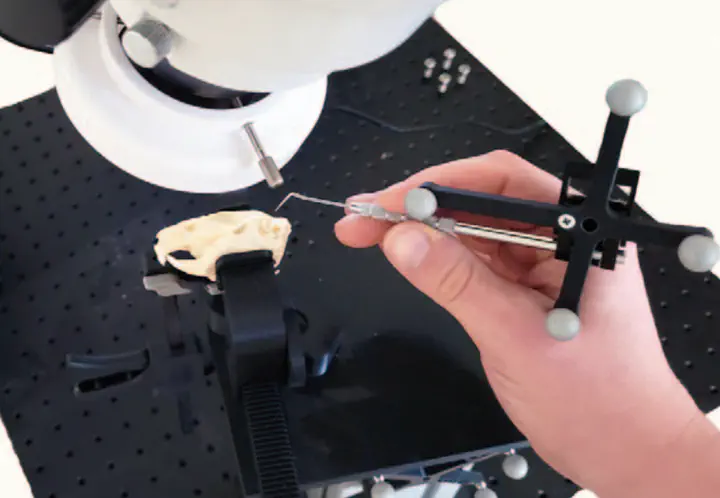
- Conclusions: This work enables researchers conducting robot-assisted surgical insertions of cochlear-implant electrode arrays using a guinea-pig animal model to estimate the pose of a guinea-pig cochlea by locating six externally observable features on the guinea pig, without the need for CT scans.
Type
Publication
In Otology and Neurotology
David E. Usevitch
Medical Robotics Research Fellow
My research interests include distributed robotics, mobile computing and programmable matter.